ROBOTIC TIMBER PAVILIONS
SP. 2026 ADVANCED ARCHITECTURE STUDIO
Prof. Jason Kelly Johnson
The Robotic Timber Pavilions (RTP) studio reframes how non-standard timber structures are conceived and assembled, extending additive digital fabrication into full-scale architectural production. In this context, arches and shell systems operate as primary testbeds, capitalizing on their geometric clarity and structural efficiency to advance robotic assembly strategies.
Studio Focus:
Material and Performance-driven explorations in Wood (parametrically derived arches, vaults and shells)
Robotic Fabrication and AR/AI Integration (robotic assembly, Augmented Reality / AI workflows)
Full-scale prototyping and integrated fabrication processes combined with performance-driven structural optimization
Integrating parametric design with semi-autonomous construction workflows through human collaboration
This focus reflects a broader shift in architectural education towards research–driven material computation and hands-on craftsmanship, blended with explorations in digital fabrication.
The RTP studio begins with small-scale individual explorations and culminates in the collaborative design, robotic fabrication and installation of a full-scale demonstration pavilion.
The studio was led by Prof. Jason Kelly Johnson (Founder and Co-Director of the CCA Digital Craft Lab)
Special Thanks: Tyson Philips (Robotics Expert / BOK Computational Designer), Felix Weber (Engineer / RDH Building Science)
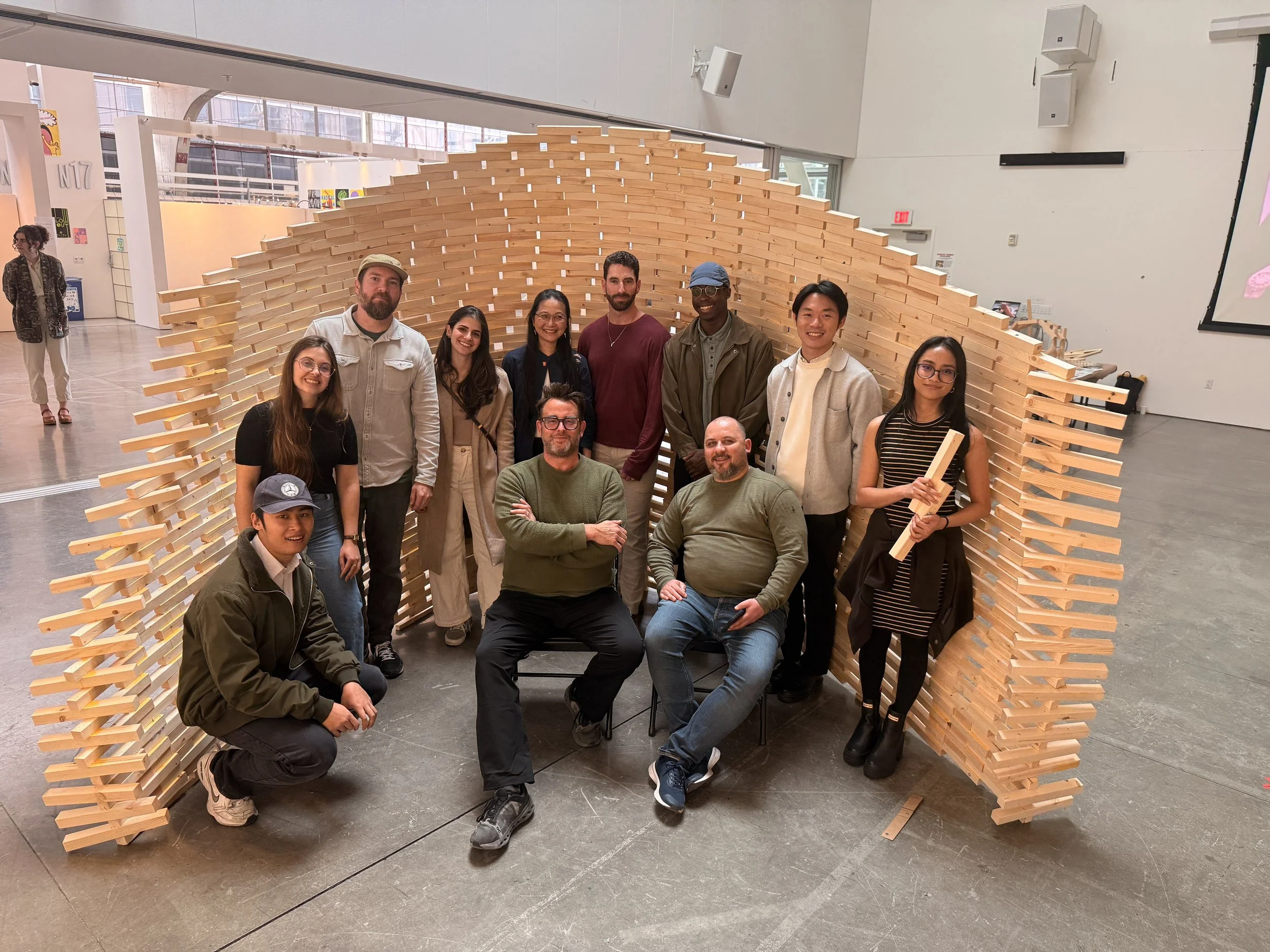
Shell Students: Alex Liang, Danielle Khoury Gregorio, Konstantin Komarov, Anastasha Luz Aco, Siow Fang Tan
Stack Students: Chris Long, Michael Ammon, David Rege, Mariana Carneiro Guagliardi, Seymour Tseng

The Stacked Pavilion
THE STACKED PAVILION
This student-led design-build project focused on the creation of stacked timber arches composed of approximately 1,000 one-foot-long 2x2 elements. Organized as a system of spatial modules, the arches were parametrically designed to repeat within a diamond grid pattern with variable heights and spacing, producing a flexible architectural field. Each arch was constructed from timber members that progressively twisted as they moved vertically, generating a dynamic interplay between structure, geometry, and surface articulation.
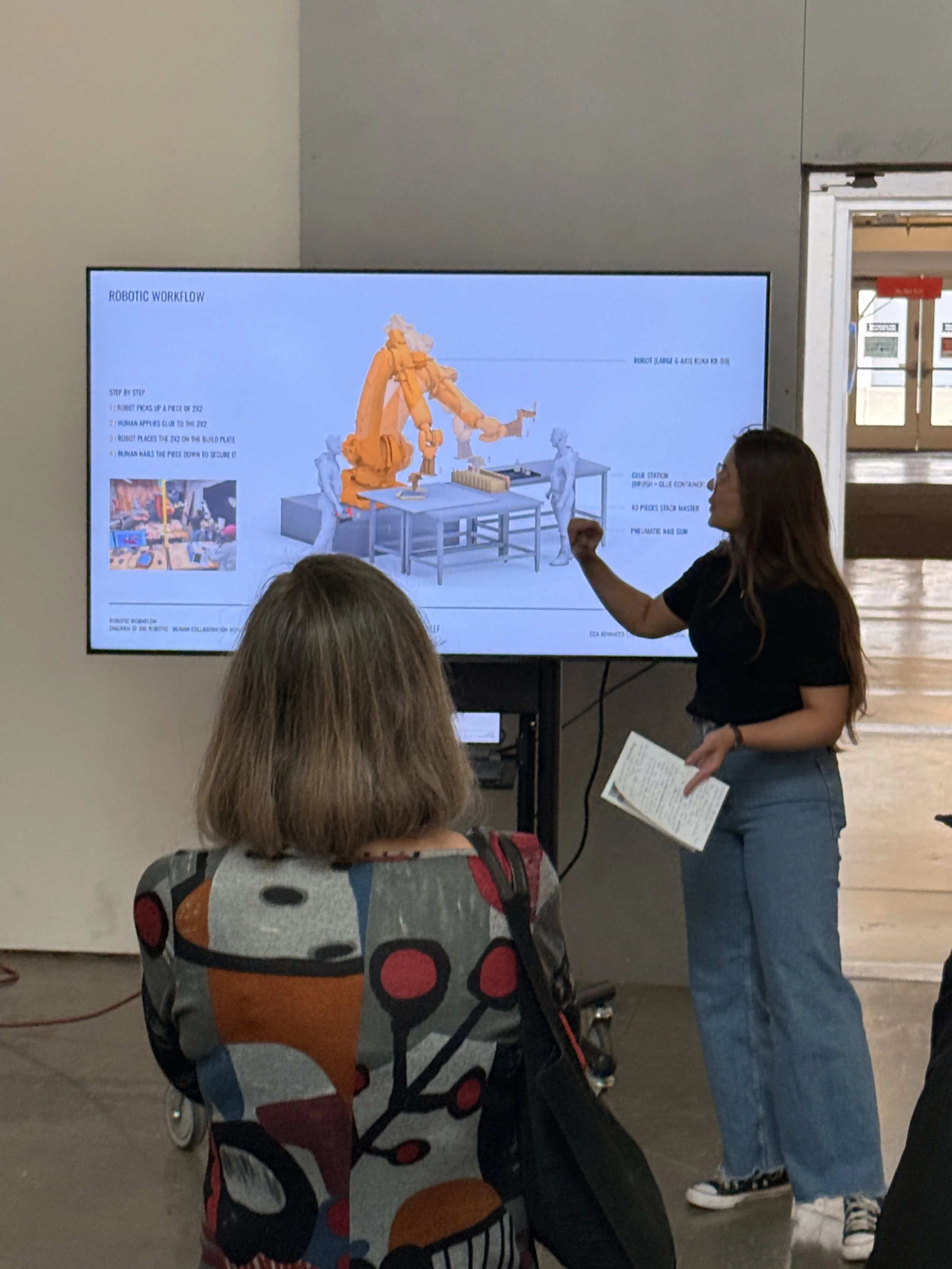
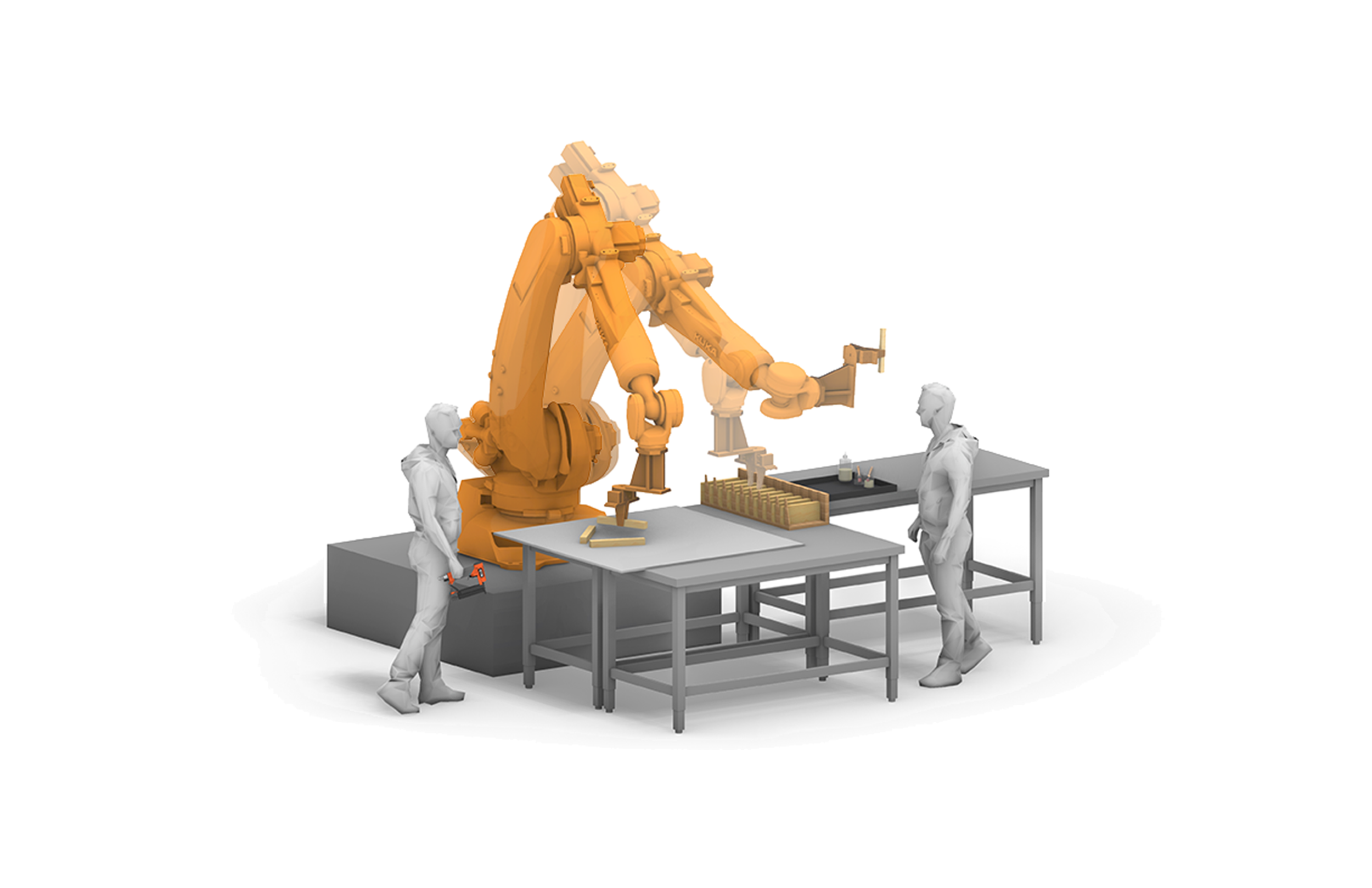
The project emphasized collaboration at every stage, with students working collectively as both designers and fabricators while engaging directly with robotic construction workflows. The entire assembly was modeled in Rhino and Grasshopper, while KUKA|prc was used to generate robotic toolpaths, control the opening and closing of the Schunk pneumatic gripper, simulate assembly sequences, and produce the final robotic code. Rather than operating as a fully autonomous system, the robotic process relied on continuous interaction between students and the KUKA KR90 robot, establishing a hybrid workflow in which human intuition, craft, and decision-making were integrated with robotic precision and repeatability.
Students worked side-by-side with the robot to sequentially glue, staple, and assemble timber elements into transportable structural segments. This collaborative process required teams to coordinate material preparation, robotic sequencing, adhesive application, fastening, and quality control in real time, transforming the fabrication environment into a shared space of experimentation and collective problem-solving. The resulting segments were scaled for ease of transport and installation, then bolted together during final assembly within an interior exhibition space.
Augmented Reality workflows further reinforced this collaborative relationship between digital systems, robotic assembly, and human participants. The Fologram AR application, running on iPads, was used throughout fabrication and installation to assist with assembly sequencing, placement, and positional verification both in the shop-studio and exhibition environments. As students refined the workflow through multiple public installations, the team developed an increasingly efficient assembly process, ultimately enabling the pavilion to be erected in under one hour.
THE SHELL PAVILION
This student-driven design-build project explored the development of a lightweight timber shell assembled from hundreds of one-foot-long 2x2 wood members. Drawing inspiration from the pioneering thin-shell work of engineer Félix Candela, the project reimagined principles traditionally associated with reinforced concrete through the use of discrete timber aggregation and robotic assembly. The structure was organized as a series of doubly curved shell modules, where variations in spacing, density, and curvature generated an evolving relationship between structural performance, geometric logic, and spatial experience. Material density increased strategically in areas of higher stress and curvature, allowing the shell to achieve greater strength while maintaining an overall sense of lightness and permeability.
Collaboration was central to the project’s methodology, with students operating simultaneously as computational designers, fabricators, and assembly teams within a shared robotic workflow. The shell was modeled using Rhino and Grasshopper, while KUKA|prc was employed to generate robotic toolpaths, simulate assembly sequences, and control the Schunk pneumatic gripper throughout fabrication. Rather than functioning as a fully automated process, the system depended on an ongoing dialogue between students and the KUKA KR90 robot, creating a hybrid mode of construction that combined robotic accuracy with human judgment, adaptability, and craft.
Working directly alongside the robot, students sequentially glued, stapled, and assembled timber members into manageable structural segments. The fabrication process required continuous coordination between robotic movement, material handling, fastening, adhesive application, and quality control, transforming the studio into a collaborative environment of experimentation and iterative making. The resulting installation formed a porous, occupiable timber shell whose variable perforations filtered daylight into the space, producing shifting patterns of illumination, shadow, and atmospheric depth.

The Shell Pavilion